
درایور استپ موتور
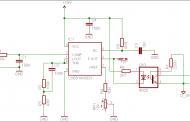
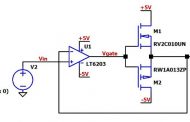
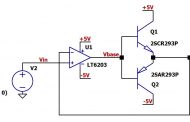
درایور استپ موتور ساخته شده تشکیل شده از یک میکروی آرم که پالسهای منطقی جهت چرخش استپ موتور را تولید نموده و این پالسهای دیجیتالی توسط یک مدار درایور PWM تقویت شده و به ۴ عدد سوییچ که به صورت فول بریج به هم بسته شده اند ، می فرستد .
استپ موتور یک دستگاه الکترومغناطیسی است که پالسهای دیجیتالی را به یک چرخش مکانیکی شفت تبدیل میکند از مزایای استپموتور اطمینان پذیری بالا و قدرت بالا در سرعتهای پایین وساختار قوی برای کار در هر محیطی میباشد که اینها دلایل استفاده از استپموتور در این طرح میباشد.
استپ موتورها همچنین دارای یک توانایی دیگری به نام Holding Torque میباشند. این خاصیت باعث میشود که استپموتورها در حالت ایستا توانایی تحمل بار را داشته و قادر به ترمز و نگهداری بار در یک نقطه را داشته باشند . بدین ترتیب نیاز به ترمز مکانیکی از بین میرود. با توجه به خاصیت بالا آینهها در حالت سکون محکم در جای خود قرار میگیرند و در هنگام عبور پرتو لیزر دچار لغزش و انحراف نمیشوند. استپ موتور انتخابی از نوع ۵ فاز بوده تا بتواند دقت زاویه ای چرخش معادل ۰٫۷۲ درجه را به ما بدهد .با توجه به این قضیه انتظار میرود که با ارسال هر پالسی به درایور استپ موتور شفت آن به میزان ۰٫۷۲ درجه جابجایی داشته باشد و در نهایت به طور دقیق در زاویه مورد نظر خواسته شده قرار گیرد اما از آنجایی که همه این موارد در حالت ایده آل اتفاق می افتد لازم است که از یک سیستم انکودر که در روی شفت موتور نصب میشود جهت فیدبک زاویه چرخشی به درایور آن ارسال کرد تا زاویه چرخشی دقیقا برابر زاویه خواسته شده باشد.ذکر این نکته نیز ضروری است که کوپلینگ انکودر با شفت موتور در همه قسمتها به آسانی انجام نمی پذیرد و باعث نقصانهایی در قسمتهای دیگر میشود.لذا بهتر آن است که از استپ موتور هایی که همراه با انکدر می باشند استفاده شود.بدین ترتیب دیگر مشکل نصب انکدر بر روی شفت هم مرتفع خواهد شد.انکدرهایی که در بازار موجود میباشد از ۲۰ پالس در یک دور تا ۸۰۰۰ پالس در یک دور موجود میباشد که با توجه به نوع استپ موتور انتخاب میشود.همانطور که در بالا عنوان شد زاویه چرخشی و سرعت چرخش آن توسط انکودر تعیین میشود.اما با توجه به نوع انکودری که انتخاب میشود احتیاج است که زاویه صفر چرخشی شفت به نوعی تعیین شود تا در هنگام قطع و وصل مجدد برق سیستم زاویه فعلی شغت موتور از بین نرود.
انکودرها در دو نوع Incremental یا Absolute هستند.در نوع اول خروجی انکودر به صورت پالسهایی هستند که تعداد آنها در واحد زمانی توسط یک میکرو شمرده میشود و باتوجه به دقت خود انکودر زاویه شفت حساب میشود.در این حالت باید از یک تشخیص دهنده زاویه صفر برای شفت موتور استفاده کرد.
نوع دیگر انکودر که از نوع Absolute میباشد دارای خروجی BCD ،BINARY و GRAY میباشد و مقدار زاویه شفت در خروجی انکودر حفظ میشود ونیازی به وجود تشخیص دهنده زاویه صفر ندارد.
برای تشخیص زاویه صفر میتوان از یک زوج نوری مادون قرمز (OptoEncoder) استفاده کرد .به طوریکه فرستنده- گیرنده مادون قرمز در یک ماژول در کنار هم و در یک سمت قرار دارند روی شفت درست در مقابل این ماژول نوری یک نقطه سیاه ایجاد میشود به طوری که در هنگامی که این نقطه درست در مقابل این زوج نوری قرار میگیرد،پالسی از این زوج نوری مبنی بر زاویه صفر گرفته میشود. همانطور که واضح است از آینههای متعددی جهت انتقال پرتو لیزر به نقطه مورد نظر استفاده میشود و با توجه به اینکه برای کنترل هر آینه از دو استپ موتور جداگانه استفاده میشود پس باید بتوان به هر موتور فرمان جداگانهای برای چرخش در جهت دلخواه داد به طوری که هیچ تاثیری در جهت بقیه آینهها نداشته باشد. بنابراین نقش یک سیستم کنترلی پایدار در نحوه کنترل استپ موتورها اهمییت به سزایی پیدا میکند. کل سیستم از دو قسمت اصلی تشکیل می شود، قسمتی که وظیفه اش تنظیم زاویه آینه در دو محور X-Y است وکنترل کننده میزان چرخش دو استپ موتور است.از هر کدام از این استپ موتورها برای چرخش آینه در یک محور جداگانه استفاده می شود.این مدار فرمان لازم جهت چرخش را از بخشی دیگر دریافت می کند. قسمت دیگر مدار بخش مرکزی است که شامل میکرو فرماندهنده می باشد و اطلاعات دریافتی از کاربر را به سایر قسمتها ارسال میکند و از قسمتهای دیگر اطلاعات لازمه را دریافت میکند.