در این بخش به مطالبی چون بررسی بازدهی منبع تغذیه باک خواهیم پرداخت .اتلاف توان در سوییچها در طول دوره های “روشن” و “خاموش” شدن نتیجه همپوشانی موقتی جریان و ولتاژ در طول انتقالهای سوئیچینگ است.دیود هرزگزد نیز دچار اتلاف سوئیچینگ مرتبط با عمل بازیابی معکوس دیود است، جایی که دوباره یک تنش ولتاژ و جریان در طول انتقالات وجود دارد. شکل موج ریپل در القاگر منجر به اتلاف جریان گردابی و هیسترزیس در ماده هسته میشود.
بازده منبع تغذیه باک
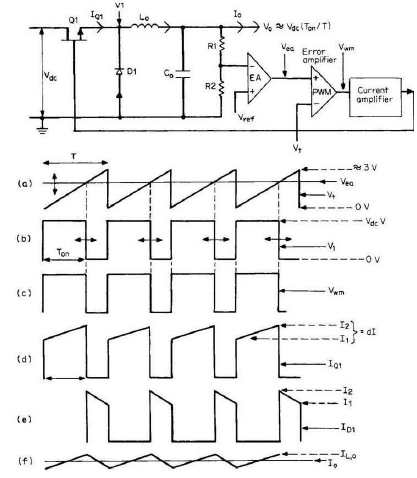
برای بدست آوردن یک درک کلی برای اتلاف توان ذاتی در منبع تغذیه باک در مقایسه با یک رگولاتور خطی، ما با فرض ایدهآل بودن ترانزیستور Q1 و دیود D1 در هر دو توپولوژی شروع خواهیم کرد. با استفاده از جریانهای نشان داده شده در شکل ۱٫۴ قسمت d و e، تلفات القا در Q1 و دیود هرزگرد D1 میتواند محاسبه شود و بازده بدست آید. توجه کنید هنگامی که Q1 “خاموش” است ولتاژ آن ماکزیمم(Vdc) اما در جریان صفر عمل میکند. هنگامی که Q1 “روشن” است، جریان جاری میشود، اما ولتاژ در Q1 صفر است. در همین زمان ، D1 در ولتاژ Vdc بطور معکوس بایاس میشود اما جریان صفر است. (بوضوح، اگر Q1 و D1 مؤلفههای ایدهآل بودند، جریانها در Q1 و D1 با افت ولتاژ صفر جاری میشدند، و اتلاف صفر میبود).
در نتیجه بر خلاف رگولاتور خطی که حتی با قطعات ایدهآل، دارای یک اتلاف ذاتی است اما اتلاف ذاتی در یک رگولاتور سوئیچینگ با قطعات ایدهآل صفر است و بازده %۱۰۰ است. در نتیجه در رگولاتور باک، بازده واقعی به عملکرد واقعی قطعات بستگی دارد. از آنجایی که اصلاحات در نیمه هادیها بطور پیوسته انجام میشوند، ما حتی بازدههای بالاتری را مشاهده خواهیم کرد.
برای در نظر گرفتن قطعات واقع گرایانهتر، تلفات در مدار باک، تلفات هدایتی در Q1 و D1 و تلفات مقاومتی سیم پیچ در چوک باید در نظر گرفته شود. محاسبه تلفات مقاومتی، که به جریانهای DC میانگین مربوط هستند، نسبتاً آسان است. ما باید تلفات سوئیچینگ AC در Q1 و D1 ، و اتلاف القاییAC در هسته القاگر را به این مقدار اضافه کنیم، در نتیجه محاسبه تلفات سوئیچینگ دشوارتر است.
اتلاف سوئیچینگ در Q1 در طول دوره های “روشن” و “خاموش” شدن نتیجه همپوشانی موقتی جریان و ولتاژ در طول انتقالهای سوئیچینگ است. دیود D1 همچنین دچار اتلاف سوئیچینگ مرتبط با عمل بازیابی معکوس دیود است، جایی که دوباره یک شرط تنش ولتاژ و جریان در طول انتقالات وجود دارد. شکل موج ریپل در القاگر L0 منجر به اتلاف جریان گردابی و هیسترزیس در ماده هسته میشود. ما اکنون بعضی از تلفات معمول را محاسبه خواهیم کرد.
محاسبه تلفات هدایتی و بازدهی مرتبط با منبع تغذیه باک
با نادیده گرفتن اثرات مرتبه دوم و تلفات سوئیچینگ AC، اتلاف هدایتی میتواند تقریباً به آسانی محاسبه شود. میتوان از شکل ۱٫۴ قسمت d و e مشاهده کرد که جریانهای میانگین در Q1 و D1 در طول زمانهای هدایت Ton و Toff آنها، مقادیری در مرکز رمپ یا Io یعنی جریان خروجی DC میانگین هستند. این جریانها در ولتاژ فوروارد حدود ۱ ولت در یک دامنه وسیع از جریانها جاری میشوند. در نتیجه تلفات هدایتی تقریباً بصورت زیر خواهند بود.

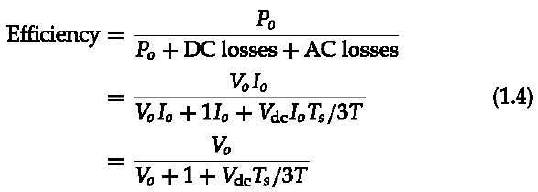
بنابراین، با نادیده گرفتن تلفات سوئیچینگ AC، بازده مرتبط با تلفات هدایتی بصورت زیر خواهد بود:

بازده منبع تغذیه باک شامل تلفات سوئیچینگ AC
مشخص کردن اتلاف سوئیچینگ منبع تغذیه باک بسیار دشوارتر است، زیرا به متغیرهای زیادی مرتبط با عملکرد نیمه رساناها و روش های درایو دستگاههای سوئیچینگ بستگی دارد. دیگر متغیرهای مرتبط با طراحیهای مدار ، شامل عملکرد اسنابر ، شکل خط بار، و آرایشهای بازیابی انرژی میشوند و به اینکه طراح استفاده از چه چیزی را در یک طراحی خاص انتخاب خواهد کرد بستگی دارد.
من محاسبات اصلی آقای پرسمن را که در ادامه نشان داده شده است را بجز مقداری ویرایش جزئی بدون تغییر رها میکنم، زیرا آنها علت اصلی اتلاف سوئیچینگ را نشان میدهند. بااینوجود، من به خواننده توصیه میکنم تا استفاده از روشهای عملیتری را برای تعیین اتلاف واقعی در نظر بگیرد.
بسیاری از تولید کنندگان نیمه رساناها اکنون معادلات اتلاف سوئیچینگ را برای دستگاههای سوئیچینگ خودشان فراهم میکنند هنگامی که شرایط درایو توصیه شده مخصوصاً IGBT های (ترانزیستورهای دو قطبی با گیت ایزوله) سریع و مدرن استفاده میشود. ادعا میشود بعضی از اسیلوسکوپهای دیجیتالِ سریع بطور واقعی اتلاف سوئیچینگ را اندازهگیری خواهند کرد، به شرط اینکه جریان و ولتاژ دستگاه بلادرنگ بطور دقیق برای اسیلوسکوپ فراهم شود.
محاسبه اتلاف سوئیچینگ جریان متناوب (یا اتلاف همپوشانی ولتاژ/جریان) به شکل و زمانبندی بالا رفتن و پایین آمدن شکل موجهای ولتاژ و جریان بستگی دارد. یک مثال خطی ایدهآل شده—که احتمال کمی وجود دارد در عمل وجود داشته باشد—در شکل ۱٫۵ قسمت a نشان داده شده است و این اصل را نشان میدهد.
شکل-۱٫۵- قسمت a سناریوی بهترین مورد را نشان میدهد. در “روشن” شدن دستگاه سوئیچینگ، ولتاژ و جریان شروع به تغییر همزمان میکنند و بطور همزمان به مقادیر نهاییشان میرسند. شکل موج جریان از ۰ به I0 میرود و ولتاژ در Q1 از یک ماکزیمم Vdc به صفر میرود. توان میانگین در طول این انتقال سوئیچینگ ![]() است، و توان میانگین در یک دوره کامل،
است، و توان میانگین در یک دوره کامل، ![]() است .
است .
با فرض سناریوی مشابه نقاط شروع و انتهای همزمان برای شکل موجهای بالا رونده ولتاژ و پایین رونده جریان در مرحله انتقال “خاموش” شدن، اتلاف همپوشانی ولتاژ/ جریان در این انتقال بوسیله ![]() بدست میآید و این توان میانگینگیری شده در یک دوره کامل،
بدست میآید و این توان میانگینگیری شده در یک دوره کامل، ![]() است.
است.
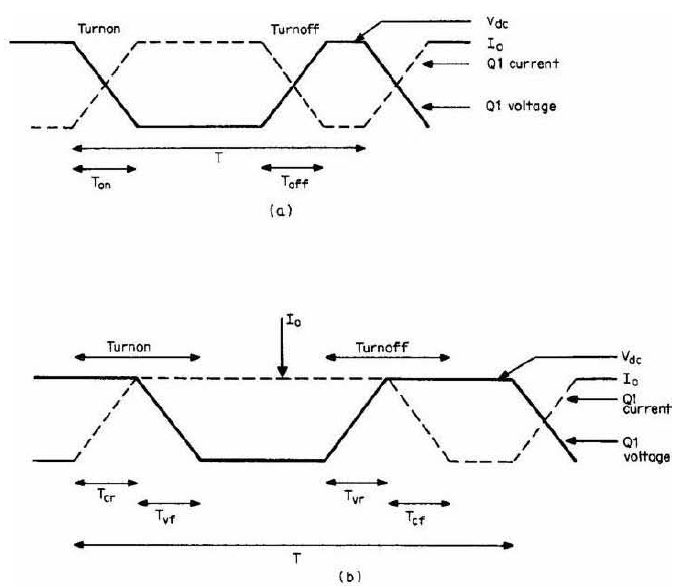
شکل ۱٫۵ شکل موجهای سوئیچینگ ترانزیستور ایدهآل شده. (a) شکل موجها، شروع و انتهای انتقالهای ولتاژ و جریان را بصورت همزمان نشان میدهند. (b) شکل موجها سناریوی بدترین مورد را نشان میدهند که ولتاژ در مرحله”روشن” شدن در Vdc(max) ثابت باقی میماند تا زمانی که جریان به ماکزیمم خودش برسد. در “خاموش” شدن، جریان در I0 ثابت باقی میماند تا زمانی که ولتاژ Q1 به ماکزیمم Vdc خودش برسد.
با فرض Ton = Toff = Ts، تلفات سوئیچینگ کامل (مجموع تلفات “خاموش” کردن و “روشن” کردن)، ![]() هستند، و بازده بصورت نشان داده شده در معادله ۱٫۴ محاسبه میشود.
هستند، و بازده بصورت نشان داده شده در معادله ۱٫۴ محاسبه میشود.
یک مقایسه جالب توجه برای محاسبه بازده منبع تغذیه باک ارائه خواهد شد و آن را با یک رگولاتور خطی مقایسه خواهد کرد. فرض کنید رگولاتور باک، ۵ ولت از ورودی ۴۵ ولت در فرکانس سوئیچینگ ۵۰ کیلوهرتز(T = 20 μs) را فراهم میکند.اگر هیچ اتلاف سوئیچینگ AC وجود نداشت و یک دوره انتقال سوئیچینگ Ts برابر با ۰٫۳ فرض شوند، معادله ۱٫۳ یک بازدهی تلفات هدایتی را بصورت زیر بدست خواهد داد.
اگر تلفات سوئیچینگ برای سناریوی بهترین حالت بصورت نشان داده شده در شکل-۱٫۵ قسمت a فرض شوند، برای Ts = 0.3 μs و T = ۲۰ μs، معادله ۱٫۴ یک بازده مرتبط با سوئیچینگ را بصورت زیر بدست خواهد داد
اگر یک سناریوی بدترین مورد ، فرض شود (که نزدیکتر به واقعیت است)، همانطور که در شکل-۱٫۵- قسمت b نشان داده شده است، بازدهها کمتر خواهند شد. در شکل-۱٫۵ قسمت b فرض میشود که در زمان “روشن” شدن، ولتاژ در ترانزیستور تا زمانی که جریان روشن شدن به ماکزیمم مقدار I0 برسد در ماکزیمم مقدار خودش (Vdc) باقی میماند. سپس ولتاژ شروع به کاهش میکند. به یک تقریب نزدیک، زمان افزایش جریان Tcr مساوی با زمان افت ولتاژ خواهد بود. پس اتلافهای سوئیچینگ “روشن” شدن بصورت زیر خواهد بود.

همچنین برای ![]()
در “خاموش” شدن (همانطور که در شکل-۱٫۵ قسمت b مشاهده میشود)، ما ممکن است فرض کنیم که جریان تا زمانی که ولتاژ به مقدار ماکزیمم خود یعنی Vdc در یک زمان TVT افزایش یافته است در این مقدار ماکزیمم I0 باقی میماند. سپس جریان شروع به کاهش میکند و به در یک زمان Tcf صفر میرسد. اتلاف “خاموش” شدن کل بصورت زیر خواهد بود

![]()
تلفات AC کل (مجموع “روشن” شدن به اضافه تلفات “خاموش” شدن) بصورت زیر خواهد بود

و تلفات کل (مجموع تلفات DC به اضافه AC) بصورت زیر خواهد بود

و بازده بصورت زیر خواهد بود
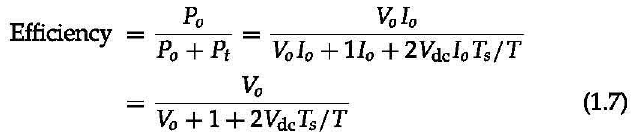
در نتیجه در سناریوی بدترین مورد، برای رگولاتور باک مشابه با Ts = 0.3 μs، بازده از معادله ۱٫۷ بصورت زیر خواهد بود
با مقایسه این مورد با یک رگولاتور خطی که کار مشابهی را انجام میدهد (۴۸ ولت را به ۵ ولت کاهش میدهد)، بازده آن (از معادله ۱٫۱) بصورت Vo/Vdc(max) خواهد بود، یا ۵/۴۸؛ این فقط ۱۰٫۴% است و بوضوح قابل قبول نیست.
انتخاب فرکانس سوئیچینگ منبع تغذیه باک
ما مشاهده کردهایم که ولتاژ خروجی منبع تغذیه باک بوسیله معادله V0 = VdcTon/T بدست میآید. اکنون باید در مورد مقدار برای فرکانس سوییچینگ تصمیمگیری کنیم. واکنش اولیه ممکن است به حداقل رساندن اندازه مؤلفههای فیلتر Lo و Co با استفاده از یک فرکانس تا حد امکان بالا باشد. با این وجود، هنگامی که تمام فاکتورها در نظر گرفته میشوند استفاده از فرکانسهای بالاتر لزوماً اندازه کلی رگولاتور را به حداقل نمیرساند.
ما میتوانیم این موضوع را بوسیله بررسی معادله ۱٫۵ که برای تلفات AC می باشد![]() بهتر مشاهده کنیم. ما مشاهده میکنیم که تلفات AC بطور معکوس با دوره سوئیچینگ T متناسب هستند. بعلاوه، این معادله فقط تلفات در ترانزیستور سوئیچینگ را نشان میدهد؛ و تلفات در دیود هرزگرد D1 را بعلت زمان بازیابی معکوس محدود آن نادیده میگیرد (زمان لازم برای اینکه دیود هدایت جریان معکوس را متوقف کند، جریان معکوس از لحظهای که آن در معرض یک ولتاژ بایاس معکوس قرار گرفته است اندازهگیری میشود).
بهتر مشاهده کنیم. ما مشاهده میکنیم که تلفات AC بطور معکوس با دوره سوئیچینگ T متناسب هستند. بعلاوه، این معادله فقط تلفات در ترانزیستور سوئیچینگ را نشان میدهد؛ و تلفات در دیود هرزگرد D1 را بعلت زمان بازیابی معکوس محدود آن نادیده میگیرد (زمان لازم برای اینکه دیود هدایت جریان معکوس را متوقف کند، جریان معکوس از لحظهای که آن در معرض یک ولتاژ بایاس معکوس قرار گرفته است اندازهگیری میشود).
دیود هرزگرد میتواند توان قابل توجهی را هدر دهد و باید از نوع بازیابی نرم و فوق سریع باشد. زمان بازیابی معکوس معمولاً ۳۵ ns یا کمتر خواهد بود.
به عبارت ساده، هرچه انتقالهای سوئیچینگ بیشتری در یک دوره خاص وجود داشته باشد، تلفات سوئیچینگ بیشتری وجود خواهد داشت. در نتیجه یک بدهبستان وجود دارد – کاهش دوره سوئیچینگ T (افزایش فرکانس سوئیچینگ) ممکن است اندازه المانهای فیلتر را کاهش دهد، اما همچنین تلفات کلی را بیشتر خواهد کرد و ممکن است به یک گرماگیر بزرگتر نیاز داشته باشد.
تذکر: با توسعه ترانزیستورها و دیودهای بهتر، کم هزینهتر، و سریعتر، این تصویر دائماً تغییر میکند. انتخاب من در مرحله فعلی تکنولوژی، طراحی زیر ۱۰۰ kHz است، به این دلیل که این مقدار برای انتخاب قطعات و طراحیهای ترانسفورماتور/القاگر راحتتر است.
در نتیجه، احتمالاً کم هزینهتر است. بطور کلی، فرکانسهای بالاتر زمان توسعه بیشتری لازم دارند و به تجربه بیشتری نیاز دارند. بااینوجود، طراحیهای تجاری پربازده در بازار در محدوده مگاهرتز موجود هستند. انتخاب نهایی به عهده طراح است. در مطالب بعدی مثالهایی را از محاسبات عملی منابع تغذیه باک خواهیم آورد.


2 دیدگاه
tictac
لطفا مثالهای بیشتری از منابع باک بزنید . ممنون از سایت خوبتون
بهمن
سلام ممنون از اطلاعاتتون