Thijs Meenink، پژوهشگر دانشگاه فنی ابندهوون، یک ربات هوشمند را بمنظور جراحی چشم توسعه داده است که جراحان چشم را قادر میسازد تا عمل بر روی شبکیه و جزاییهی چشم را با دقت و سهولت بیشتری به انجام رسانند. همچنین این سیستم بازهی زمانی کارکرد مؤثر چشمپزشکان را برای انجام چنین عملهایی افزایش میدهد. مینینک قصد دارد تا پس از دفاع از تز دکتری خود، این سیستم را تجاریسازی کند. شرح جزئیات در ادامهی مطلب.
عملهای چشمی از قبیل ترمیم شبکیه و یا درمان جداشدگی (پارگی) پردهی شبکیه دقت زیادی را میطلبد. در بسیاری از موارد، جراحان تنها در بازهی محدودی از عمر کاری خود قادر به انجام چنین عملهایی هستند. مینیک میگوید: چشمپزشکان معمولاً زمانی شروع به انجام چنین عملهایی میکنند که پیش از آن به سطح پیشرفتهای از شغل خود رسیده باشند. اما به مرور و با افزایش سن انجام چنین عملهای پیچیدهای دشوارتر میشود. سیستم جدید قادر است که به سادگی لرزش دستان چشمپزشکان را گرفته و عمر کارکرد آنان را بطور معناداری افزایش میدهد.
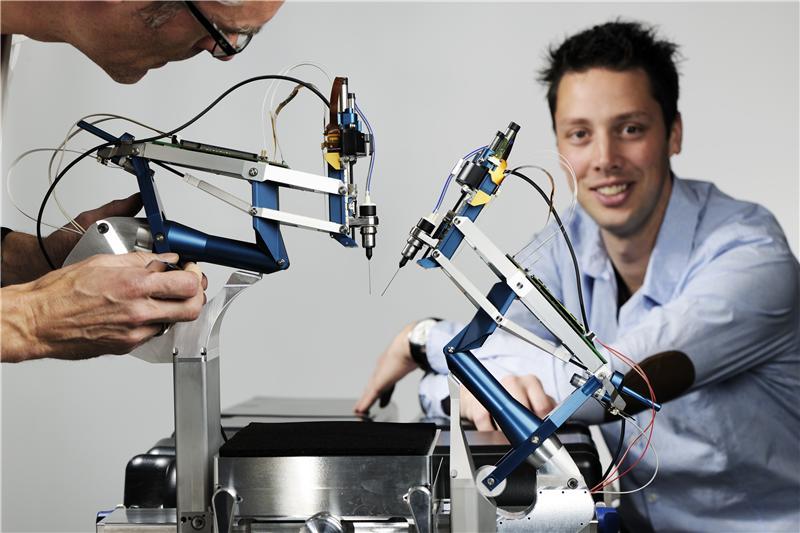
ربات از دو بخش "اصلی" و "پیرو" تشکیل شده است. کنترل کامل ربات اصلی از طرق دو Joystick در اختیار چشمپزشک است. این ربات اصلی قبلاً توسط dr.ir. Ron Hendrix به عنوان پروژهی دکتری ساخته شده بود. آنچه که مینیک ساخته، دو بازوی رباتیک به عنوان پیرو است که حرکات ربات اصلی را عیناً کپیبرداری میکند و عمل واقعی را انجام میدهد. ابزارهای بسیار کوچک سوزنی شکل بر روی بازوان ربات قرار دارند که تنها ۰٫۵ میلیمتر قطر دارند و شامل انبرکها، قیچیهای جراحی و زهکشها هستند. ربات بگونهای طراحی شده است که نقطهی ورود سوزن به چشم همیشه مکان ثابتی است تا از آسیب راندن به ساختار ظریف چشم جلوگیری شود.
مینینک همچنین یک "تعویض کنندهی ابزار" منحصر بفرد را طراحی کرده است که به بازوهای ربات پیرو اجازه میدهد که ابزارشان را تنها در عرض چند ثانیه تعویض کنند. برای مثال جایگزینی انبرکها با قیچیها. این یک فاکتور مهم در کاهش زمان در این روش است. بعضی از عملهای چشم ممکن است که تا ۴۰ بار نیاز به تعویض ابزار داشته باشند که این خود زمان قابل ملاحظهای از روال کلی عمل را به خود اختصاص میدهد.
اندازهی حرکات جراح نیز کاهش مییابد. به عنوان مثال هر سانتیمتر حرکت در Joystick بصورت یک میلیمتر حرکت در نوک ابزار ترجمه میشود. مینیک معتقد است که این امر باعث میشود تا دقت بطور شگرفی افزایش یابد.
همچنین ربات اصلی بازخوردی لمسی را عرضه میکند. چشمپزشکان کنونی به علت اینکه نیروهایی که در خلال عمل معمولاً بسیار کوچکتر از آن هستند که احساس شوند (مثلاً نیروی لازم برای استفاده از قیچی)، کاملاً بر اساس حس بینایی خود کار میکنند. در حالیکه ربات مینینک قادر است تا این نیروهای بسیار کوچک را اندازهگیری کرده و پس از تقویت به Joystick ها منتقل نماید. این امر به جراحان این امکان را میدهد تا تأثیر اعمالی که انجام میدهند را درک کنند که همین باعث افزایش دقت میشود.
سیستم مینیک و هندریکس، مزایای ارگونومیک را هم به همراه دارد. جراحان عموماً مجبورند تا بطور ایستاده بر روی سر بیمار خم شوند در حالی که بزودی قادر خواهند بود تا ربات را در حالی که در وضعیت راحتی نشستهاند، به فعالیت وا دارند. بعلاوه، ربات پیرو بسیار جمع و جور و سبک وزن است بطوریکه پرسنل اتاق عمل قادرند براحتی آن را جابجا کرده و به هنگام عمل به میز جراحی الصاق نمایند.
پروفسور Marc de Smet یکی از سرپرستان پروژهی دکتری مینینک بسیار به این سیستم علاقهمند است؛ نه تنها به این خاطر که این سیستم زمان عمل را کاهش میدهد بلکه به این خاطر که محدودیتهایی را که جراحان در عمل با دست با آن مواجهاند را از میان بر می دارد. او اینچنین شرح میدهد که: ربات جراحی چشم، گام بعدی در تکامل میکروجراحی در شاخهی چشمپزشکی است و منجر به توسعهی روشهای جدید و دقیقتر خواهد شد.
هر دو ربات اصلی و پیرو هماکنون آمادهی استفادهاند و مینینک قصد دارد تا در آیندهی نزدیک آنها را بهینه نماید. با این حال پیشبینی میشود که اولین جراحی بر روی انسان ظرف ۵ سال آینده صورت پذیرد. همچنین مینینک در نظر دارد تا در مورد فرصتهای بازار برای سیستم رباتیک خویش تحقیق نماید. ربات جراحی چشم یک پیشرفت جدید محسوب میشود ولی تا عرضه در بازار به زمان بیشتری نیاز دارد.
نظر شما چیست؟ آیا در آینده شاهد آن خواهیم بود که عامل انسانی نیز از این پروسه حذف شود؟ آنوقت شما حاضرید تا جان خود را به دست یک ربات بسپارید!؟
منبع: Sciencedaily


